



A、 关节臂测量机
B、 双悬臂测量机
C、 桥式测量机
答案:C


A、 关节臂测量机
B、 双悬臂测量机
C、 桥式测量机
答案:C


A. SELECT/0;ENDⱣⱤSELECT/
B. goto
C. Loop;endloop
D. IF/0;ENDⱣⱤIF/
A. 零件的变差
B. 测量人内部变差
C. 测量仪器的变差
D. 以上都是
A. 直线
B. .平面
C. .圆
A. 20±1度
B. 20±2度
C. 20±3度
D. 没有严格的要求

A. 原点
B. 刺穿
C. 套用
D. 偏置点
A. 测量系统的偏倚=测量值-真值(或约定真值)
B. TV(总变差)2=EV(测量设备的变差)2+PV(零件的变差)2
C. GRR(测量系统变差)2=EV(测量设备的变差)2+AV(评价人的变差)2
D. ndc(区别分类数)=1.41*(PV/GRR)
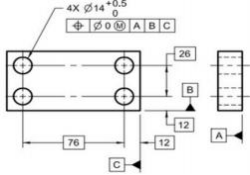 图25零件示意图
图25零件示意图
A. 四个孔的位置度标注错误,因为实际零件孔的位置度都存在误差,不可能做到
B. 四个孔位置度公差带后面的M圈多余,应该去掉
C. 如果做检测销检测四个孔的位置度,检测销直径应为14
D. 如果做检测销检测四个孔的位置度,检测销直径应为14.5
A. 零件的真值永远无法得到,只能无限与之接近;
B. 数显卡尺的准确度是0.02mm;
C. 产品控制理论关注的是零件是否在指定的范围内;
D. 过程控制理论关注的是过程变差是否稳定并可接受。
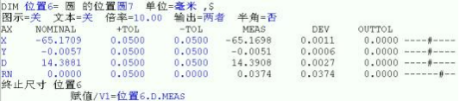
A. -65.1698
B. -0.0051
C. 14.3908
D. 0.0374
A. CTRL+W
B. ALT+W
C. SHIFT+W
D. CTRL+ALT+W

