



A、 七
B、 五
C、 六
D、 八
答案:C


A、 七
B、 五
C、 六
D、 八
答案:C



A. 编辑-报告模板
B. 编辑-标签模板
C. 编辑-定制报告
D. 编辑-传统报告
A. 平面
B. 球
C. 圆锥
D. 圆柱
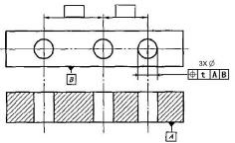 所示,其位置度相对基准A和B,说法不正确的是( )(单选)
所示,其位置度相对基准A和B,说法不正确的是( )(单选)
A. 该公差带为给定方向
B. 各孔的测得(实际)中心线在给定方向上应各自限定在间距等于t的平行平面内,每对平行平面对称于由基准平面A、B和理论正确尺寸确定理论正确位置
C. 必要时,可选择仅平移最佳拟合坐标系对数据进行处理
D. 该公差带为任意方向
A. 
B. 
C. 
D. 以上全错
A. 编辑—删除—所选部分
B. 编辑—删除—CAD元素
C. 编辑—删除—特征
D. 编辑—删除—尺寸
A. 如果新加了一个测针角度,而之前的标准球已经移动位置,校验这个角度时,需要先校验标准测针
B. 校验完测头后,需要从校验结果中检查一下校验结果是否正常
C. 发生碰撞后,需要重新校验一下测针
D. 校验测头中,可以任意选择校验点数和和标准球的校验层数
A. 用两个圆去包容实际轮廓,并使两个圆的半径差为最小,两个圆不一定同心
B. 用两个圆去包容实际轮廓,并使两个圆的半径差为最小,两个圆一定同心
C. 圆度是工件本身实际的形状,和使用什么算法评价无关,无论使用什么方法(最小区域,最小二乘等)结果都是相同的
D. 最小区域法是求得的数据与实际数据之间误差的平方和为最小。
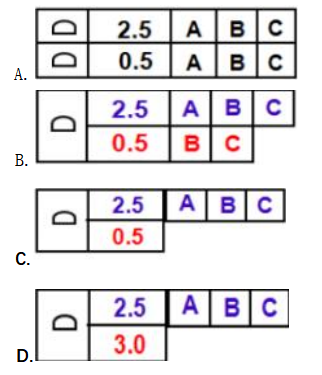
A. A
B. B
C. C
D. D
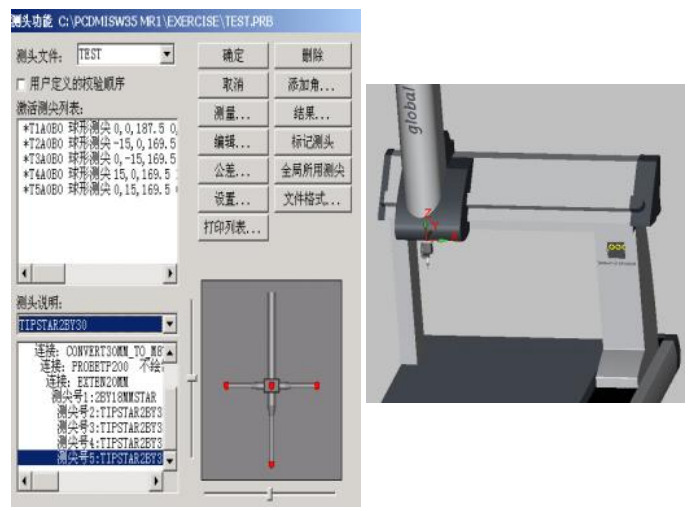
A. TIPSTAR2BY30(指向默认机器坐标轴X+)
B. TIPSTAR2BY30(指向默认机器坐标轴Y+)
C. TIPSTAR2BY30(指向默认机器坐标轴X-)
D. TIPSTAR2BY30(指向默认机器坐标轴Y-)
 ,其MMB边界为()(单选)
,其MMB边界为()(单选)
A. 6.9
B. 7.1
C. 7.3
D. 7

