



 转换成坐标系2
转换成坐标系2 ,如何操作( )(单选)
,如何操作( )(单选)
A、 围绕X+转45°
B、 围绕Y+转45°
C、 围绕Z+转45°
D、 围绕Z-转45°
答案:C

 转换成坐标系2,如何操作( )(单选)
转换成坐标系2,如何操作( )(单选)
A、 围绕X+转45°
B、 围绕Y+转45°
C、 围绕Z+转45°
D、 围绕Z-转45°
答案:C


A. 16.6
B. 24.5
C. 25.4
D. 21.6
A. 容差
B. 最小干涉
C. 最大干涉
D. 干涉。
A. 端面的平面度
B. 端面与轴线的垂直度
C. 端面的平面度以及端面与轴线垂直度的综合误差
D. 轴线的直线度
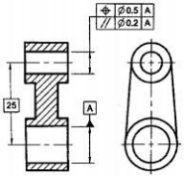 图29零件示意图
图29零件示意图
A. 25.2
B. 25.25
C. 25.5
D. 25.1
A. 线轮廓度公差只能用来控制曲线的形状精度,面轮廓度公差只能用来控制曲面的形状精度
B. 线轮廊度公差带是两条等距曲线之间的区域
C. 面轮廓度公差带是两等距曲面之间的区域
D. 线轮廓度、面轮廓度公差带中的理论正确几何形状由理论正确尺寸确定
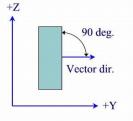
A. I=0,J=1,K=0
B. I=0,J=-1,K=0
C. I=1,J=0,K=0
D. I=0,J=0,K=1
解析:首先,让我们来看一下这道题的图片。图片中有一个三维坐标系,其中有一个矢量箭头,我们需要判断这个矢量的方向。
在三维坐标系中,我们通常用三个分量来表示一个矢量,分别是I、J、K。其中,I代表矢量在x轴上的分量,J代表矢量在y轴上的分量,K代表矢量在z轴上的分量。
现在让我们来看看选项中的各个分量:
A: I=0,J=1,K=0
B: I=0,J=-1,K=0
C: I=1,J=0,K=0
D: I=0,J=0,K=1
根据图片中箭头的指向,我们可以看出,这个矢量在y轴上的分量为1,而在x轴和z轴上的分量都为0。因此,正确答案是A选项:I=0,J=1,K=0。
举个生动有趣的例子来帮助理解:想象你站在一个三维坐标系中,你向上跳跃,那么你的运动方向就可以用一个矢量来表示,其中I和K分量为0,而J分量为正1,代表你向上跳跃的方向。
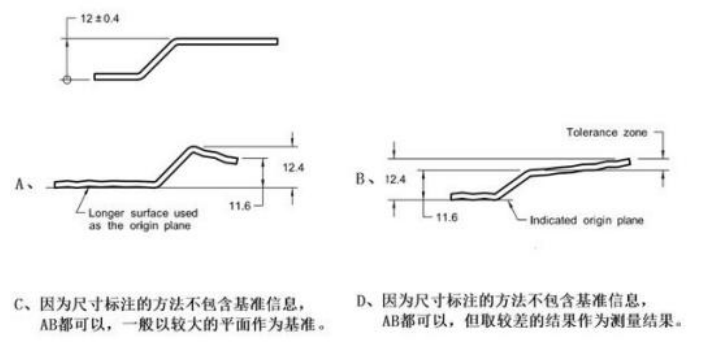
A. A
B. B
C. C
D. D
A. 最小二乘方法
B. 最小间隔法
C. 最大内接切
D. 最小外接
A. 使PC-DMIS置于平移模式
B. 使PC-DMIS置于旋转模式
C. 使PC-DMIS置于2D旋转模式
D. 使PC-DMIS置于3D旋转模式
A. 45%—60%
B. 40%—60%
C. 40%—65%
D. 没有严格的要求

