



A、 先进性、时代性
B、 时代性、纯洁性
C、 时代性、廉洁性
D、 先进性、纯洁性
答案:D


A、 先进性、时代性
B、 时代性、纯洁性
C、 时代性、廉洁性
D、 先进性、纯洁性
答案:D


A. 操作机
B. 驱动装置
C. 控制系统
D. 数控机床
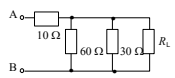
A. 40Ω
B. 30Ω
C. 20Ω
D. 100Ω
A. 正确
B. 错误
A. 齿轮齿条结构
B. 普通丝杆
C. 滚珠丝杆
D. 液压缸
A. 0
B. 某调定值
C. 某变值
D. 无法判断
A. 正确
B. 错误
A. 正确
B. 错误
A. 辅助
B. 状态
C. 输入
D. 时间
A. 关节力传感器
B. 腕力传感器
C. 指力传感器
D. 臂力传感器
A. 姿态
B. 运行状态
C. 位置
D. 速度

