220.()工业机器人是典型的机电一体化产品,但其使用难度较小,操作者应无需具有机、电、液、气等专业知识。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9990-c091-da481f4a6413.html
点击查看答案
360.()的原点设置在机器人各关节中心点处,反映了该关节处每个轴相对该关节坐标系原点位置的绝对角度。
A. 基坐标系
B. 大地坐标系
C. 关节坐标系
D. 工具坐标系
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a641d.html
点击查看答案
22.谐波传动的优点是()。
A. 扭转刚度低
B. 传动侧隙小
C. 惯量低
D. 精度高
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a6415.html
点击查看答案
125.机器人试运行是指在不改变示教模式的前提下执行模拟再现动作的功能,机器人动作速度超过示教最高速度时,以()。
A. 程序给定的速度运行
B. 示教最高速度来限制运行
C. 示教最低速度来运行
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4380-c091-da481f4a6409.html
点击查看答案
276.()只要是理想运放,不论它工作是在线性状态还是在非线性状态,其反向输入端和同相输入端均不从信号源索取电流。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6424.html
点击查看答案
393.RV减速器通过()把力传递给机器人关节。
A. 曲柄轮
B. 中心轮
C. 摆线轮
D. 输出盘
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6419.html
点击查看答案
47.正弦交流电源中,电压的最大值是有效值的()倍。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3bb0-c091-da481f4a6401.html
点击查看答案
592.要在生产中引入工业机器人系统的工程,在制造与试运行阶段不包括()。
A. 制作准备
B. 制作与采购
C. 安装与试运行
D. 运转率检查
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7648-c091-da481f4a6407.html
点击查看答案
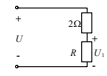
559.在下图所示电路中,电源电压U=6V。若使电阻R两端的电压U1=4V,则电阻R的阻值为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6409.html
点击查看答案
570.下图所示电路中,网孔1的网孔电流方程为()。

A. 11Im1-3Im2=5
B. 11Im1+3Im2=5
C. 11Im1+3Im2=-5
D. 11Im1-3Im2=-5
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6414.html
点击查看答案












