109.()在机构中,每一构件都以一定的方式与其他构件相互连接,这种由两个构件直接接触的可动连接称为运动副。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6419.html
点击查看答案
281.()为了获得更大的输出电流容量,可以将多个三端稳压器直接并联使用。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6402.html
点击查看答案
338.陀螺仪是利用()原理制作的。
A. 惯性
B. 光电效应
C. 电磁波
D. 超导
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a6407.html
点击查看答案
322.工业机器人运动自由度数,一般()。
A. 小于2个
B. 小于3个
C. 小于6个
D. 大于6个
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641b.html
点击查看答案
557.电容器C的端电压从0升至U时,电容器吸收的电能为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6407.html
点击查看答案
164.计算机处理信息时经常以字节或字的形式处理,字包含的二进制信息有()位。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a640c.html
点击查看答案
22.下列被测物理量适用于使用红外传感器进行测量的是()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a640b.html
点击查看答案
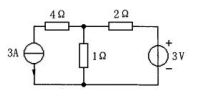
576.下图所示电路中,2Ω电阻的吸收功率P等于()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a641a.html
点击查看答案
326.()年,我国制成第一部完全国产化机器人。
A. 1959
B. 1962
C. 1982
D. 1987
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641f.html
点击查看答案
90.()对于给定的工具坐标系在世界坐标系上的位置与姿态数据,在确定的构造和多旋转数据情况下,机器人关节位移矩阵具有唯一解。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6406.html
点击查看答案












