338.()开环调速系统对于负载变化时引起的转速变化不能自我调节,但对其它外界扰动时能自我调节的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6414.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
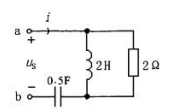
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案
38.2022年5月10日,庆祝中国共产主义青年团成立100周年大会在北京人民大会堂隆重举行,习近平出席大会并发表重要讲话,强调历史和实践充分证明,中国共青团不愧为中国青年运动的( ),不愧为党的忠实助手和可靠后备军。
A. 预备队
B. 突击队
C. 冲锋队
D. 先锋队
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a641c.html
点击查看答案
309.中国科技大学在()年组建了国内第一支RobotCup仿真足球队。
A. 1996
B. 1991
C. 1998
D. 2000
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a640e.html
点击查看答案
390.()用直流双臂电桥测量电阻时,应使电桥电位接头的引线比电流接头的引出线更靠近被测电阻。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6422.html
点击查看答案
467.机器人动作级编程语言又可以分为()和末端执行器编程两种动作编程。
A. 腕级编程
B. 关节级编程
C. 手部级编程
D. 本体级编程
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a641a.html
点击查看答案
107.一般工业机器人至少需要()个自由度,才能使手部达到活动范围内任意目标及姿态。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a641b.html
点击查看答案
81.机器人运动学是研究机器人末端执行器与关节空间之间的()关系。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6418.html
点击查看答案
217.夹钳式取料手用来加持方形工件,一般选择()指端。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a641c.html
点击查看答案
69.图像预处理包括()。
A. 滤波
B. 二值化
C. 形态学操作
D. 特征识别
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a640c.html
点击查看答案









