



A、 8V
B、 -2V
C、 2V
D、 -4V
答案:B


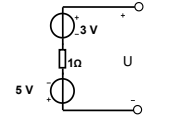
A、 8V
B、 -2V
C、 2V
D、 -4V
答案:B


A. 正确
B. 错误
A. 优化算法
B. 平滑算法
C. 预测算法
D. 插补算法
A. 位置
B. 时间
C. 速度
D. 频率
A. 机械结构复杂
B. 可靠性比较好
C. 动力系统不成熟
D. 控制系统不成熟
A. 控制算法误差
B. 分辨率系统误差
C. 机械误差
D. 传动误差
A. 点焊
B. 弧焊
C. 间断焊
D. 连续焊
A. 正确
B. 错误
A. 智能
B. 机能
C. 动能
D. 物理能
A. 柔性手腕
B. 真空吸盘
C. 换接器
D. 定位销
A. 10011101000
B. 1001001010110
C. 1001001001010110
D. 1111101100011000

