



A、 速度为零,加速度为零
B、 速度为零,加速度恒定
C、 速度恒定,加速度为零
D、 速度恒定,加速度恒定
答案:A


A、 速度为零,加速度为零
B、 速度为零,加速度恒定
C、 速度恒定,加速度为零
D、 速度恒定,加速度恒定
答案:A


A. 
B. 
C. 
D. 2
A. 点焊
B. 喷漆
C. 喷涂
D. 弧焊
A. 正确
B. 错误
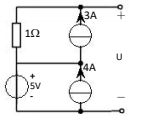
A. 8V
B. -2V
C. 2V
D. -4V
A. 正确
B. 错误
A. 世界坐标系
B. 基坐标系
C. 工具坐标系
D. 工件坐标系
A. 只受弯矩
B. 只受扭矩
C. 既受弯矩又受扭矩
D. 只受剪力
A. 改变电枢电压
B. 改变电源频率
C. 改变励磁电流
D. 改变极对数
A. 或非门
B. 与非门
C. 异或门
D. OC门
A. 平面
B. V型
C. 一字型
D. 球型

