357.在机器人坐标系的判定中,我们用食指指向()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a641a.html
点击查看答案
300.()电流互感器在运行时,二次绕组绝不能开路,否则就会感应出很高的电压,造成人身和设备事故。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6415.html
点击查看答案
370.多关节机器人常见的有六轴和()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6402.html
点击查看答案
19.2022年1月25日,习近平在中国同中亚五国建交30周年视频峰会上发表讲话,强调中国坚定支持中亚国家走符合本国国情的发展道路,坚定支持各国维护本国( ),坚定支持各国追求民族振兴和团结自强,坚定支持各国在国际舞台上发挥更大作用。
A. 主权
B. 独立
C. 经济自主
D. 领土完整
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-4100-c091-da481f4a6400.html
点击查看答案
58.若要求高精度测量1Ω以下的小电阻,则应选用()进行测量。
A. 单臂电桥
B. 万用表1Ω挡
C. 毫伏表
D. 双臂电桥
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3bb0-c091-da481f4a640c.html
点击查看答案
475.一水平放置的双伸出杆液压缸,采用三位四通电磁换向阀,要求阀处于中位时,液压泵卸荷,且液压
缸浮动,其中位机能应选用()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6422.html
点击查看答案
122.()19世纪60年代和20世纪70年代是机器人发展最快、最好的时期,这期间的各项研究发明有效的推动了机器人技术的发展和推广。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6426.html
点击查看答案
567.下图所示电路中,A元件是()功率。
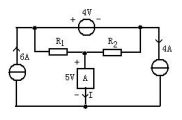
A. 吸收
B. 产生
C. 不消耗
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6411.html
点击查看答案
138.轨迹规划是将所有的关节变量表示为()的函数。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4380-c091-da481f4a6416.html
点击查看答案
16.()机器人末端执行器吸附式取料手适用与大平面、易碎、微小的物品。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a640a.html
点击查看答案









