392.电动机通过()把力传递给RV减速器的行星轮。
A. 曲柄轮
B. 中心轮
C. 摆线轮
D. 输出盘
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6418.html
点击查看答案
30.下列十进制数与二进制数转换结果正确的是()。
A. (8)10=(110)2
B. (4)10=(1000)2
C. (10)10=(1100)2
D. (9)10=(1001)2
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a6413.html
点击查看答案
476.一水平放置的双伸出杆液压缸,采用三位四通电磁换向阀,要求阀处于中位时,液压泵卸荷,且液压缸闭锁不动,其中位机能应选用()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6423.html
点击查看答案
309.中国科技大学在()年组建了国内第一支RobotCup仿真足球队。
A. 1996
B. 1991
C. 1998
D. 2000
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a640e.html
点击查看答案
569.下图所示电路中,节点a的节点电压方程为()。
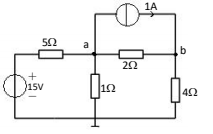
A. 8Ua-2Ub=2
B. 1.7Ua-0.5Ub=2
C. 1.7Ua+0.5Ub=2
D. 1.7Ua-0.5Ub=-2
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6413.html
点击查看答案
11.党的二十大报告中指出,要构建高水平社会主义市场经济体制,坚持和完善社会主义基本经济制度,毫不动摇巩固和发展(),毫不动摇鼓励、支持、引导()发展,充分发挥市场在资源配置中的决定性作用,更好发挥政府作用。( )
A. 公有制经济,非公有制经济
B. 非公有制经济,公有制经济
C. 市场经济、计划经济
D. 计划经济、市场经济
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a6401.html
点击查看答案
222.下列工业机器人手腕关节结构中,具有两个自由度的是()。
A. BBR
B. BBB
C. BRR
D. RRR
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6421.html
点击查看答案
211.()使能键的作用是用于异常情况下停止机器人的运动。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9990-c091-da481f4a640a.html
点击查看答案
292.()异步计数器的工作速度一般高于同步计数器。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a640d.html
点击查看答案
41.()这几项都属于机器人智能性的特点。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a6412.html
点击查看答案









