



A、 转数计数器电缆
B、 I/O接口电缆
C、 电动机动力电缆
D、 示教器电缆
答案:D


A、 转数计数器电缆
B、 I/O接口电缆
C、 电动机动力电缆
D、 示教器电缆
答案:D


A. 三极管
B. 二极管
C. 晶闸管
D. 场效应管
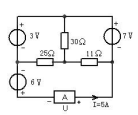
A. 4V
B. 16V
C. -10V
D. -16V
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
A. 左位
B. 中位
C. 右位
D. 任意位置
A. 坐标
B. 方位
C. 角度
D. 矩阵
A. 正确
B. 错误

