118.()和液压驱动系统相比,气压驱动系统的功率-质量比要高得多。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6422.html
点击查看答案
6.工业机器人轨迹准确度由下列()等因素决定。
A. 位置轨迹准确度
B. 姿态轨迹准确度
C. 轨迹速度准确度
D. 摆幅误差
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a6405.html
点击查看答案
72.工业机器人生产线设计原则有()。
A. 各工作站的生产周期尽量合拍
B. 物流通畅
C. 生产线具备一定的柔性
D. 留下升级改造余地
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a640f.html
点击查看答案
78.()磁力吸盘能够吸住所有金属材料制成的工件。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a6421.html
点击查看答案
4.党的二十大报告中明确指出,我们坚持走中国特色社会主义政治发展道路,全面发展全过程人民民主,社会主义民主政治( )全面推进,人民当家作主更为扎实,全面依法治国总体格局基本形成。
A. 制度化
B. 规范化
C. 程序化
D. 公开化
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a6410.html
点击查看答案
94.工业机器人按坐标形式分类,包括()。
A. 直角坐标式
B. 圆柱坐标式
C. 球坐标式
D. 关节坐标式
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3b40-c091-da481f4a6401.html
点击查看答案
381.机器人吸附式执行器分为()。
A. 机械式夹持器、专用工具
B. 磁吸式执行器、电吸式执行器
C. 磁吸式执行器、气吸式执行器
D. 电吸式执行器、气吸式执行器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a640d.html
点击查看答案
180.三位五通电磁阀的常态位置是()。
A. 左位
B. 中位
C. 右位
D. 任意位置
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a641c.html
点击查看答案
257.()精确测量1Ω以下电阻的阻值时,最好选用直流双臂电桥测量。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6411.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
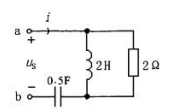
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案









