100.机器人外部传感器不包括()传感器。
A. 力或力矩
B. 接近觉
C. 触觉
D. 位置
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a6414.html
点击查看答案
69.()关节i的坐标系放在i-1关节的末端。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a6418.html
点击查看答案
38.下面各选项中,()不是并联电路的特点。
A. 加在各并联支路两端的电压相等
B. 电路内的总电流等于各分支电路的电流之和
C. 并联电阻越多,则总电阻越小,且其值小于任一支路的电阻值
D. 电流处处相等
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a641b.html
点击查看答案
333.机器人主要分为内部传感器和外部传感器两类。可测量物体的罪和位置,识别物体的形状、颜色、温度、嗅觉、听觉、味觉等,该传感器称为()。
A. 内部传感器
B. 组合传感器
C. 外部传感器
D. 智能传感器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a6402.html
点击查看答案
212.工业机器人的I/O电路是通过I/O模板与外围元器件和设备进行()信号的电路。
A. 接收
B. 接收和发送
C. 转换
D. 发送
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6417.html
点击查看答案
562.下图所示的电路中,A元件两端的端电压U等于()。
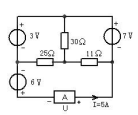
A. 4V
B. 16V
C. -10V
D. -16V
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640c.html
点击查看答案
241.在响应快载荷大的伺服系统中往往采用(),原因是其输出力与质量比最大。
A. 液压驱动
B. 气压驱动
C. 电气驱动
D. 机械驱动
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6411.html
点击查看答案
192.()机械加工、喷涂、装配、搬运、焊接五大领域是目前主要应用领域。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a641e.html
点击查看答案
182.()能够实现往复式间歇运动。
A. 槽轮
B. 棘轮
C. 凸轮
D. 不完全齿轮
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a641e.html
点击查看答案
480.为平衡重力负载,使运动部件不会因自重而自行下落,在恒重力负载情况下,采用()顺序阀作平衡阀。
A. 内控内泄式
B. 内控外泄式
C. 外控内泄式
D. 外控外泄式
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6a90-c091-da481f4a6402.html
点击查看答案









