



A、 美国
B、 日本
C、 德国
D、 瑞典
答案:D


A、 美国
B、 日本
C、 德国
D、 瑞典
答案:D


A. 智能
B. 动能
C. 机能
D. 物理能
A. 正确
B. 错误
A. 齿轮链
B. 同步皮带
C. 谐波齿轮
D. 摆线针轮传动减速器
A. 正确
B. 错误
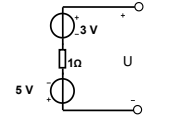
A. 8V
B. -2V
C. 2V
D. -4V
A. O型
B. M型
C. Y型
D. H型
A. 直角坐标式
B. 圆柱坐标式
C. 球坐标式
D. 关节坐标式
A. X轴
B. Y轴
C. Z轴
D. a
A. 正确
B. 错误
A. 时间制动控制式
B. 行程制动控制式
C. 时间、行程混合控制式
D. 其他

