



A、 增加
B、 减少
C、 不变
D、 无法判断
答案:A


A、 增加
B、 减少
C、 不变
D、 无法判断
答案:A


A. 增加
B. 减小
C. 不变
D. 不确定
A. 姿态
B. 运行状态
C. 位置
D. 速度
A. 正确
B. 错误
A. 位置
B. 时间
C. 速度
D. 频率
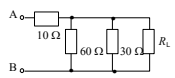
A. 40Ω
B. 30Ω
C. 20Ω
D. 100Ω
A. 正确
B. 错误
A. 正确
B. 错误
A. 最大极限尺寸
B. 最小极限尺寸
C. 基本尺寸
D. 实际尺寸
A. 4
B. 8
C. 1024
D. 4096
A. 相贯线
B. 截交线
C. 母线
D. 轮廓线

