



A、 圆
B、 椭圆
C、 半圆
D、 半球
答案:A


A、 圆
B、 椭圆
C、 半圆
D、 半球
答案:A


A. 正确
B. 错误
A. 正确
B. 错误
A. 操作模式
B. 编辑模式
C. 管理模式
D. 学习模式
A. 正确
B. 错误
A. S轴
B. R轴
C. B轴
D. T轴
A. 3
B. 5
C. 6
D. 8
A. cm/min
B. in/min
C. mm/sec
D. in/sec
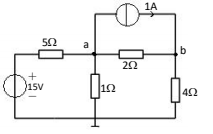
A. 8Ua-2Ub=2
B. 1.7Ua-0.5Ub=2
C. 1.7Ua+0.5Ub=2
D. 1.7Ua-0.5Ub=-2
A. 1920
B. 1930
C. 1959
D. 1976
A. B
B. P
C. R
D. S

