183.低压电缆的屏蔽层要(),外面要有绝缘层,以防与其他接地线接触相碰。
A. 接零
B. 接设备外壳
C. 多点接地
D. 一端接地
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a641f.html
点击查看答案
131.对于转动关节而言,关节变量是运动学中的()。
A. 关节角
B. 杆件长度
C. 横距
D. 扭转角
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4380-c091-da481f4a640f.html
点击查看答案
572.理想运算放大器在线性工作时,可以认为同相输入端电流i+与反相输入端电流i-是()。
A. 等于0
B. 等于无穷大
C. 相等
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6416.html
点击查看答案
163.()直流伺服电机具有较小的起到转矩和较大的转动惯量。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6401.html
点击查看答案
321.()闭环调速系统采用负反馈控制,是为了提高系统的机械特性硬度,扩大调速范围。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6403.html
点击查看答案
287.()在任意时刻,组合逻辑电路输出信号的状态,仅仅取决于该时刻的输入信号。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6408.html
点击查看答案
323.()有静差调速系统是依靠偏差进行调节的,而无静差调速系统则是依靠偏差对作用时间的积累进行调节的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6405.html
点击查看答案
567.下图所示电路中,A元件是()功率。
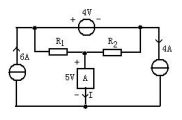
A. 吸收
B. 产生
C. 不消耗
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6411.html
点击查看答案
250.工业机器人的驱动方式中,直接驱动方式是指()。
A. 外部驱动机构驱动臂部的形式
B. 驱动机构与回转轴同轴式
C. 驱动机构与回转轴正交式
D. 驱动电动机安装在关节内部的形式
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a641a.html
点击查看答案
58.电阻元件的参数可用()来表达。
A. 电阻R
B. 电感L
C. 电容C
D. 电导G
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6401.html
点击查看答案