278.()电压放大器主要放大的是信号的电压,而功率放大器主要放大的是信号的功率。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6426.html
点击查看答案
247.基于C语言编程技术中,()属于合法标识符。
A. 8my_word
B. my_time
C. for
D. abc.c
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6417.html
点击查看答案
85.工业机器人基座轴(外部轴)的类型包括()。
A. 滚珠丝杠型
B. 齿轮齿条型
C. V带传动型
D. 同步带传动型
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a641c.html
点击查看答案
117.()气压驱动系统用压缩空气作为气源驱动直线或旋转气缸,用人工或电磁阀进行控制。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6421.html
点击查看答案
344.()异步电动机的变频调速装置,其功能是将电网的恒压恒频交流电变换成变压变频的交流电,对交流电动机供电,实现交流无级调速。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a641a.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
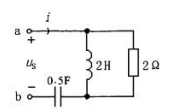
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案
98.()机器人的关节种类决定了机器人的运动自由度。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a640e.html
点击查看答案
442.机械由输入、传动、输出、安装固定四个部分组成,而接受能量、物质、信息是()。
A. 输入部分
B. 输出部分
C. 传动部分
D. 安装固定部分
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6401.html
点击查看答案
178.三相异步电动机正反转控制电路中,互锁的作用是()。
A. 保证起动后持续运行
B. 防止主电路短路
C. 防止控制电路发生短路
D. 防止电机启动后自动停止
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a641a.html
点击查看答案
380.常见机器人手部分为()三类。
A. 机械式夹持器、吸附式执行器、专用工具
B. 电磁式夹持器、吸附式执行器、通用工具
C. 通用工具、吸附工具、专用工具
D. 磁吸式执行器、气吸式执行器、专用工具
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a640c.html
点击查看答案









