85.正确选用电气元件应遵循的两个基本原则是安全原则和()原则。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a6405.html
点击查看答案
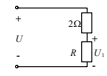
559.在下图所示电路中,电源电压U=6V。若使电阻R两端的电压U1=4V,则电阻R的阻值为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6409.html
点击查看答案
42.一般工业机器人的腕部有()这几个自由度。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a6413.html
点击查看答案
49.()属于谐波发生器的种类。
A. 凸轮式谐波发生器
B. 滚轮式谐波发生器
C. 偏心盘式谐波发生器
D. 凹轮式谐波发生器
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a641a.html
点击查看答案
374.腕部的关节轴线与臂部的纵轴线共线,回转角度不受结构限制,可以回转360°以上,该运动用()表示。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6406.html
点击查看答案
237.()机器人是具有脑、手、脚等三要素的个体。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9990-c091-da481f4a6424.html
点击查看答案
156.()气压驱动系统不污染环境,偶然地或少量地泄露气体不至于对生产产生严重地影响。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-91c0-c091-da481f4a6421.html
点击查看答案
323.()有静差调速系统是依靠偏差进行调节的,而无静差调速系统则是依靠偏差对作用时间的积累进行调节的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6405.html
点击查看答案
285.KUKA机器人被()公司收购。
A. 阿里巴巴
B. 京东
C. 美的
D. 格力
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6419.html
点击查看答案
1.2022年10月16日,习近平在二十大报告中指出,我们隆重庆祝中国共产党成立一百周年、中华人民共和国成立七十周年,制定第( )个历史决议,在全党开展党史学习教育,号召全党学习和践行伟大建党精神。
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3548-c091-da481f4a6400.html
点击查看答案









