42.习近平总书记在庆祝中国共产主义青年团成立100周年大会上的重要讲话指出,共青团要增强引领力、组织力和( ),团结带领广大团员青年成长为有理想、敢担当、能吃苦、肯奋斗的新时代好青年。
A. 动员力
B. 行动力
C. 执行力
D. 服务力
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a6420.html
点击查看答案
206.最早提出工业机器人概念,并申请了专利的是()。
A. 戴沃尔
B. 约瑟夫•英格伯格
C. 理査德•豪恩
D. 比尔•盖茨
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6411.html
点击查看答案
331.()晶闸管直流调速系统机械特性可分为连续段和断续段,断续段特性的出现,主要是因为晶闸管导通角θ太小,使电流断续。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a640d.html
点击查看答案
340.()串级调速可以将串入附加电动势而增加的转差功率,回馈到电网或者电动机轴上,因此它属于转差功率回馈型调速方法。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6416.html
点击查看答案
20.机器人的精度主要依存于()。
A. 控制算法误差
B. 分辨率系统误差
C. 机械误差
D. 传动误差
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a6413.html
点击查看答案
464.()型机器人通过沿三个互相垂直的轴线的移动来实现机器人手部空间位置的改变。
A. 直角坐标
B. 圆柱坐标
C. 极坐标
D. 关节
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6417.html
点击查看答案
210.工业机器人的机械结构系统由()三大件组成。
A. 基座、手臂、示教器
B. 基座、手臂、控制柜
C. 本体、控制柜、示教器
D. 基座、手臂、末端操作器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6415.html
点击查看答案
5.全面建成社会主义现代化强国,总的战略安排是分两步走:从二〇二〇年到二〇三五年基本实现社会主义现代化;从二〇三五年到本世纪中叶把我国建成( )的社会主义现代化强国。
A. 富强
B. 民主
C. 文明
D. 和谐
E. 美丽
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a6411.html
点击查看答案
252.()机器人三自由度腕部关节有RRR、BBR、RBR三种表示方法。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a640c.html
点击查看答案
564.下图所示电路中,A元件是()功率。
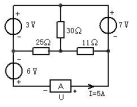
A. 消耗
B. 产生
C. 不消耗
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640e.html
点击查看答案









