



A、 液压
B、 气压
C、 手动
D、 电力
答案:ACD


A、 液压
B、 气压
C、 手动
D、 电力
答案:ACD


A. 正确
B. 错误
A. 断开
B. 接通短路
C. 损坏
D. 不变
A. 接近觉传感器
B. 接触觉传感器
C. 力觉传感器
D. 视觉传感器
A. 降低功率因数
B. 提高功率因数
C. 维持电流
D. 增加无功功率

A. 负载
B. 电源
C. 电容
D. 电感
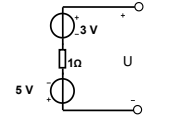
A. 8V
B. -2V
C. 2V
D. -4V
A. 正确
B. 错误
A. 美国
B. 中国
C. 瑞典
D. 日本
A. 接近开关
B. 光电传感器
C. 指示灯
D. 电磁阀
A. 正确
B. 错误

