



A、 普通平键连接
B、 导向键连接
C、 滑键连接
D、 双键连接
答案:ABC


A、 普通平键连接
B、 导向键连接
C、 滑键连接
D、 双键连接
答案:ABC


A. 正确
B. 错误
A. 正确
B. 错误
A. 无
B. KUKA
C. YASKAWA
D. FANUC
A. 无效
B. 有效
C. 延时后有效
D. 不确定
A. 正确
B. 错误
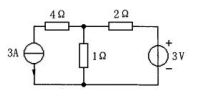
A. 4W
B. 8W
C. 0W
D. 2W
A. 正确
B. 错误
A. 回转型传动机构
B. 平移型传动机构
C. 滚动型传动机构
D. 滑动型传动机构
A. 完成一次正向运动学计算的时间
B. 完成一次逆向运动学计算的时间
C. 完成一次正向动力学计算的时间
D. 完成一次逆向动力学计算的时间
A. 正确
B. 错误

