326.()年,我国制成第一部完全国产化机器人。
A. 1959
B. 1962
C. 1982
D. 1987
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641f.html
点击查看答案
34.电路就是电流通过的路径,由电源、()、连接导线和辅助器件所组成。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a6417.html
点击查看答案
251.()机器人二自由度腕部关节有RR、BB、RB三种表示方法。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a640b.html
点击查看答案
46.()工业机器人控制装置一般由一台微型或小型计算机及相应的接口组成。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a6401.html
点击查看答案
80.机器人外部轴的工作方式分为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6417.html
点击查看答案
307.()在双极性的SPWM调制方式中,参考信号和载波信号均为双极性信号。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a641c.html
点击查看答案
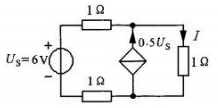
565.分析下图所示电路,电流I等于()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640f.html
点击查看答案
128.()为了提高轮式移动机器人的移动能力,研究者设计出了可实现原地转的全向轮。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-91c0-c091-da481f4a6405.html
点击查看答案
402.()是传感器的动态特性指标,是指传感器的输入信号变化后,其输出信号变化一个稳定值所需要的时间。
A. 响应时间
B. 重复性
C. 精度
D. 分辨性
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a6422.html
点击查看答案
46.2022年6月22日,习近平在金砖国家工商论坛开幕式上发表主旨演讲,指出金砖合作进入( )新阶段。希望企业家们发扬坚韧不拔、勇立潮头的精神,做开放发展的推动者、创新发展的领军者、共享发展的践行者,给金砖合作加油加力。
A. 高速发展
B. 全方位合作
C. 高增速发展
D. 高质量发展
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a6403.html
点击查看答案









