579.戴维宁定理说明一个线性有源二端网络可等效为()和内阻()。
A. 短路电流串联
B. 开路电压串联
C. 开路电流并联
D. 开路电压并联
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a641d.html
点击查看答案
272.()差动放大电路在理想对称的情况下,可以完全消除零点漂移现象。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6420.html
点击查看答案
66.()完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a6415.html
点击查看答案
476.一水平放置的双伸出杆液压缸,采用三位四通电磁换向阀,要求阀处于中位时,液压泵卸荷,且液压缸闭锁不动,其中位机能应选用()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6423.html
点击查看答案
257.工业机器人常用的编程方式是()。
A. 示教编程和离线编程
B. 示教编程和在线编程
C. 在线编程和离线编程
D. 示教编程和软件编程
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6421.html
点击查看答案
109.()在机构中,每一构件都以一定的方式与其他构件相互连接,这种由两个构件直接接触的可动连接称为运动副。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6419.html
点击查看答案
45.下图所示电路中,端电压U为()。
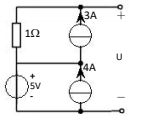
A. 8V
B. -2V
C. 2V
D. -4V
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a6422.html
点击查看答案
279.六轴机器人的工作速度指的是机器人在合理的工作负荷下匀速运动时机械接口中心或者工具中心点在单位时间内转动的角速度或者移动的距离,其中机械接口中心是指()。
A. 底座四个螺栓孔对角线的焦点
B. 第六轴法兰盘中心位置
C. 既是底座四个螺栓孔对角线的焦点,也是第六轴法兰盘中心为止
D. 既不是底座四个螺栓孔对角线的焦点,也不是第六轴法兰盘中心为止
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6413.html
点击查看答案
43.习近平总书记在庆祝中国共产主义青年团成立100周年大会上的重要讲话中指出,新时代的广大共青团员,要做( )模范,带头学习马克思主义理论,树立共产主义远大理想和中国特色社会主义共同理想,自觉践行社会主义核心价值观,大力弘扬爱国主义精神。
A. 理想远大、信念坚定
B. 刻苦学习、锐意创新
C. 敢于斗争、善于斗争
D. 艰苦奋斗、无私奉献
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a6400.html
点击查看答案
15.党的二十大报告中指出,要增强维护国家安全能力,坚定维护( ),确保粮食、能源资源、重要产业链供应链安全,维护我国公民、法人在海外合法权益,筑牢国家安全人民防线。
A. 粮食安全
B. 国家政权安全
C. 制度安全
D. 意识形态安全
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a641b.html
点击查看答案









