157.旋转式编码器输出脉冲多,表示()。
A. 输出电压高
B. 分辨率低
C. 输出电流大
D. 分辨率高
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6405.html
点击查看答案
177.空心杯非磁性转子交流伺服电动机,当只有励磁绕组通入励磁电流时,产生的磁场为()磁场。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6419.html
点击查看答案
298.()是指机器人在做20000次以上重复动作时,与初始位置之间的最大偏差。
A. 承载能力
B. 运动范围
C. 到达距离
D. 重复定位精度
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a6403.html
点击查看答案
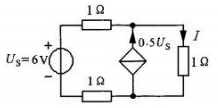
565.分析下图所示电路,电流I等于()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640f.html
点击查看答案
15.党的二十大报告中指出,要增强维护国家安全能力,坚定维护( ),确保粮食、能源资源、重要产业链供应链安全,维护我国公民、法人在海外合法权益,筑牢国家安全人民防线。
A. 粮食安全
B. 国家政权安全
C. 制度安全
D. 意识形态安全
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a641b.html
点击查看答案
241.()机器人使用的驱动装置主要是电机驱动装置。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6401.html
点击查看答案
326.()年,我国制成第一部完全国产化机器人。
A. 1959
B. 1962
C. 1982
D. 1987
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641f.html
点击查看答案
377.()感应同步器通常采用滑尺加励磁信号,而由定尺输出位移信号的工作方法。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6415.html
点击查看答案
92.工业机器人一般由()等部分组成。
A. 操作机
B. 驱动装置
C. 控制系统
D. 数控机床
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6423.html
点击查看答案
66.()完成某一特定作业时具有多余自由度的机器人称为冗余自由度机器人。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a6415.html
点击查看答案









