301.机器人速度的单位是()。
A. cm/min
B. in/min
C. mm/sec
D. in/sec
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a6406.html
点击查看答案
107.一般工业机器人至少需要()个自由度,才能使手部达到活动范围内任意目标及姿态。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a641b.html
点击查看答案
223.()绘制电气原理图时,电器应是未通电时的状态。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9990-c091-da481f4a6416.html
点击查看答案
310.()对自动控制系统而言,若扰动产生在系统内部,则称为内扰动。若扰动来自系统外部,则叫外扰动。两种扰动都对系统的输出量产生影响。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a641f.html
点击查看答案
370.()三位四通电磁换向阀,当电磁铁失电不工作时,既要使液压缸浮动,又要使液压泵卸荷,应该采用“M”形的滑阀中位机能。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a640e.html
点击查看答案
333.机器人主要分为内部传感器和外部传感器两类。可测量物体的罪和位置,识别物体的形状、颜色、温度、嗅觉、听觉、味觉等,该传感器称为()。
A. 内部传感器
B. 组合传感器
C. 外部传感器
D. 智能传感器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5af0-c091-da481f4a6402.html
点击查看答案
558.下图所示电路中A.B两点间的等效电阻与电路中的RL相等,则RL等于()。
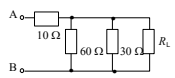
A. 40Ω
B. 30Ω
C. 20Ω
D. 100Ω
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6408.html
点击查看答案
16.当电气设备发生接地故障,接地电流通过接地体向大地流散,若人在接地短路点周围行走,其两脚间的电位差引起的触电叫()触电。
A. 单相
B. 跨步电压
C. 感应电
D. 直接
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a6405.html
点击查看答案
582.求线性有源二端网络内阻时,无源网络的等效电阻法应将电流源作()处理。
A. 开路
B. 短路
C. 保留
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6420.html
点击查看答案
190.微机中的中央处理器包括控制器和()。
A. ROM
B. RAM
C. 存储器
D. 运算器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6401.html
点击查看答案









