65.对输入脉冲信号防止干扰的输入滤波采用()实现。
A. 降低电压
B. 重复计数
C. 整形电路
D. 高速计数
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3bb0-c091-da481f4a6413.html
点击查看答案
177.空心杯非磁性转子交流伺服电动机,当只有励磁绕组通入励磁电流时,产生的磁场为()磁场。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6419.html
点击查看答案
302.()变压器的铜耗是通过空载测得的,而变压器的铁耗是通过短路试验测得的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6417.html
点击查看答案
298.()是指机器人在做20000次以上重复动作时,与初始位置之间的最大偏差。
A. 承载能力
B. 运动范围
C. 到达距离
D. 重复定位精度
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a6403.html
点击查看答案
6.党的二十大报告中明确指出,在全面建设社会主义现代化国家的前进道路上,必须牢牢把握以下重大原则:( )。
A. 坚持和加强党的全面领导
B. 坚持中国特色社会主义道路
C. 坚持以人民为中心的发展思想
D. 坚持深化改革开放
E. 坚持发扬斗争精神
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3d18-c091-da481f4a6412.html
点击查看答案
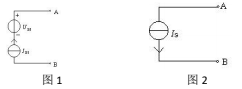
556.已知下图1中的US1=4V,IS1=2A。用下图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6406.html
点击查看答案
437.数字信号不随着时间连续变化信号,它是由()来表示。
A. 二进制
B. 八进制
C. 十进制
D. 十六进制
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-62c0-c091-da481f4a6421.html
点击查看答案
192.()机械加工、喷涂、装配、搬运、焊接五大领域是目前主要应用领域。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a641e.html
点击查看答案
115.()机器人视觉技术是把机器视觉加入到工业机器人应用系统中,相互协调完成相应工作的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a641f.html
点击查看答案
358.()由于PLC是采用周期性循环扫描方式工作的,因此对程序中各条指令的顺序没有要求。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6402.html
点击查看答案









