73.()工业机器人视觉集成系统坐标系的标定,是将工业机器人坐标系与视觉单元坐标系关联起来。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a641c.html
点击查看答案
246.()适用于自动化生产线搬运、装配及码垛。
A. 工业机器人
B. 军用机器人
C. 社会发展与科学研究机器人
D. 服务机器人
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6416.html
点击查看答案
261.()三相负载做三角形连接时,若测出三个相电流相等,则三个线电流也必然相等。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-9d78-c091-da481f4a6415.html
点击查看答案
525.气动仪表中,()将测量参数与给定参数比较并进行处理,使被控参数按需要的规律变化。
A. 变送器
B. 比值器
C. 调节器
D. 转换器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a640c.html
点击查看答案
119.通常对机器人进行示教编程时,要求最初程序点与最终程序点的位置(),可提高工作效率。
A. 相同
B. 不同
C. 无所谓
D. 分离越大越好
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4380-c091-da481f4a6403.html
点击查看答案
321.()闭环调速系统采用负反馈控制,是为了提高系统的机械特性硬度,扩大调速范围。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6403.html
点击查看答案
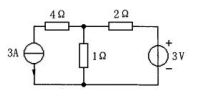
576.下图所示电路中,2Ω电阻的吸收功率P等于()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a641a.html
点击查看答案
42.一个色环电感为黄、紫、黑、金标注,该电感的值是()。
A. 47H
B. 4.7H
C. 47uH
D. 4.7uH
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-37c8-c091-da481f4a641f.html
点击查看答案
228.工业机器人常用的行走机座是()。
A. 二轮车
B. 三轮车
C. 两足行走机构
D. 导轨
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4f38-c091-da481f4a6404.html
点击查看答案
381.机器人吸附式执行器分为()。
A. 机械式夹持器、专用工具
B. 磁吸式执行器、电吸式执行器
C. 磁吸式执行器、气吸式执行器
D. 电吸式执行器、气吸式执行器
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5ed8-c091-da481f4a640d.html
点击查看答案









