



A、正确
B、错误
答案:A


A、正确
B、错误
答案:A


A. 同测性
B. 竞争性
C. 互补性
D. 整合性
A. 电压
B. 亮度
C. 力和力矩
D. 距离
A. 梯形图
B. 指令表
C. 逻辑功能图
D. C语言
A. 绝对定位精度
B. 重复定位精度
C. 机械精度
D. 控制精度
A. 内部
B. 外部
C. 电子
D. 电磁
A. 机械误差
B. 控制算法
C. 随机误差
D. 系统误差
A. 正确
B. 错误
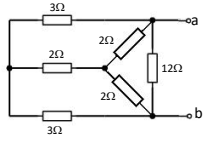
A. 2Ω
B. 6Ω
C. 8Ω
D. 10Ω
A. 哈尔滨
B. 北京
C. 上海
D. 广州
A. 正确
B. 错误

