78.机器人机械系统的精度主要涉及位姿精度和()。
A. 重复位姿精度
B. 轨迹精度
C. 重复轨迹精度
D. 动态特性
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6415.html
点击查看答案
207.示教器属于机器人()子系统。
A. 驱动系统
B. 机器人-环境交互系统
C. 人机交互系统
D. 控制系统
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4b50-c091-da481f4a6412.html
点击查看答案
289.IP防护等级后的两位数,第一位数字表示()。
A. 防止固体异物进入的等级
B. 防止进水的等级
C. 既代表防止固体异物进入的等级,又代表防止进水的等级
D. 既不代表防止固体异物进入的等级,又不代表防止进水的等级
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a641d.html
点击查看答案
436.模拟信号无法直接输入计算机。计算机内部能够处理的信号是数字信号,来自传感器的模拟信号必须经过A/D(模拟/数字)转换器转换成()信号才能输入计算机。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-62c0-c091-da481f4a6420.html
点击查看答案
165.将二进制数010101011001转换为十进制数是()。
A. 559
B. 1369
C. 1631
D. 3161
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a640d.html
点击查看答案
312.()由于比例调节是依靠输入偏差来进行调节的,因此比例调节系统中必定存在静差。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a6421.html
点击查看答案
160.绕线式异步电动机转子串电阻启动时,启动电流减小,启动转矩增大的原因是()。
A. 转子电路的有功电流变大
B. 转子电路的无功电流变大
C. 转子电路的转差率变大
D. 转子电路的转差率变小
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6408.html
点击查看答案
158.三相异步电动机的电源频率为50Hz,额定转速为1455r/min,相对应的转差率为()。
A. 0.004
B. 0.03
C. 0.18
D. 0.52
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6406.html
点击查看答案
2.()社会保险是指国家或社会对劳动者在生育、年老、疾病、工伤、待业、死亡等客观情况下给予物质帮助的一种法律制度。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8220-c091-da481f4a6401.html
点击查看答案
564.下图所示电路中,A元件是()功率。
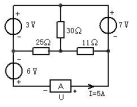
A. 消耗
B. 产生
C. 不消耗
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a640e.html
点击查看答案









