



A、正确
B、错误
答案:B


A、正确
B、错误
答案:B


A. X坐标偏移值
B. Y坐标偏移值
C. Z坐标偏移值
D. 角度变化值
A. 正确
B. 错误
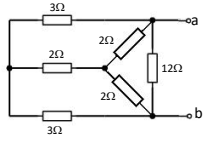
A. 2Ω
B. 6Ω
C. 8Ω
D. 10Ω
A. 正确
B. 错误
A. 重定位精度
B. 防护等级
C. 功能选项
D. 承重能力
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
A. 单个
B. 温度
C. 位移
D. 几个
A. 正确
B. 错误

