



A、正确
B、错误
答案:A


A、正确
B、错误
答案:A


A. 灵活工作空间
B. 次工作空间
C. 工作空间
D. 奇异形位
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
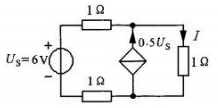
A. 1A
B. 2A
C. 3A
D. 4A
A. 正确
B. 错误
A. 辅助
B. 状态
C. 输入
D. 时间
A. 474pF
B. 0.47uF
C. 0.047pF
D. 0.047uF
A. 提高生产效率
B. 操作简单易掌握
C. 操作人员安全
D. 降低废品率
A. 串联油路
B. 并联油路
C. 串并联油路
D. 其他

