453.为保证机床操作者的安全,机床照明灯的电压应选()。
A. 380V
B. 220V
C. 110V
D. 36V以下
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a640c.html
点击查看答案
179.()在实际研究中,往往把机器人控制系统简化成若干个简单的低阶的子系统来描述。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6411.html
点击查看答案
341.()在转子回路串入附加直流电动势的串级调速系统中,只能实现低与同步转速以下的调速。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6417.html
点击查看答案
584.有功功率、无功功率和视在功率的单位是分别是()。
A. 瓦(W),伏安(VA)和乏(Var)
B. 瓦(W),乏(Var)和伏安(VA)
C. 伏安(VA),瓦(W)和乏(Var)
D. 乏(Var),瓦(W)和伏安(VA)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6422.html
点击查看答案
313.世界上第一台点焊机器人Unimate开始使用于()年。
A. 1955
B. 1959
C. 1962
D. 1965
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a6412.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
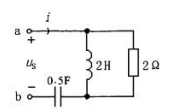
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案
585.已知交流RL串联电路,总电压U=10V,电阻R上电压UR=6V,则电感上电压UL=()V。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7648-c091-da481f4a6400.html
点击查看答案
16.按照机器人的技术发展水平,可以将工业机器人分为三代()。
A. 示教再现型机器人
B. 模拟机器人
C. 感知机器人
D. 智能机器人
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a640f.html
点击查看答案
100.人社部发布有关工业机器人的新职业是()。
A. 工业机器人系统操作员
B. 工业机器人操作调整工
C. 工业机器人系统运维员
D. 工业机器人装调维修工
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3b40-c091-da481f4a6407.html
点击查看答案
582.求线性有源二端网络内阻时,无源网络的等效电阻法应将电流源作()处理。
A. 开路
B. 短路
C. 保留
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6420.html
点击查看答案









