



A、正确
B、错误
答案:A


A、正确
B、错误
答案:A


A. 正确
B. 错误
A. 正确
B. 错误
A. 敢于自我革命
B. 全面深化改革
C. 全面从严治党
D. 全面依法治国
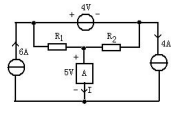
A. 1A
B. 2A
C. -1A
D. -2A
A. 内部控制分辨率
B. 坐标变换误差
C. 关节的实际结构尺寸与机器人控制系统所用的模型尺寸间的差异
D. 机械缺陷
A. 光纤式传感器
B. 超声波传感器
C. 电涡流式传感器
D. 激光传感器
A. 焊接机器人
B. 喷涂机器人
C. 装配机器人
D. 码垛机器人
A. 正确
B. 错误
A. 传感器部分
B. 机构部分
C. 控制部分
D. 信息处理部分
A. 齿轮轴
B. 行星轮
C. 曲柄轴
D. 摆线轮

