93.电流继电器使用时,其吸引线圈直接或通过电流互感器()在被控电路中。
A. 并联
B. 串联
C. 串联或并联
D. 任意连接
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a640d.html
点击查看答案
24.工业机器人指令位姿和实到位姿间的偏差产生的原因有()。
A. 内部控制分辨率
B. 坐标变换误差
C. 关节的实际结构尺寸与机器人控制系统所用的模型尺寸间的差异
D. 机械缺陷
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a6401.html
点击查看答案
389.()改变直流单臂电桥的供电电压值对电阻的测量精度也会产生影响。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6421.html
点击查看答案
18.机器人控制系统按其控制方式可以分为()。
A. 力控制方式
B. 轨迹控制方式
C. 示教控制方式
D. 运动控制方式
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a6411.html
点击查看答案
573.在有n个结点、b条支路的电路网络中,可以列出独立KCL方程的个数为()。
A. n
B. b+n+1
C. n-1
D. b-n+1
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6417.html
点击查看答案
38.2022年5月10日,庆祝中国共产主义青年团成立100周年大会在北京人民大会堂隆重举行,习近平出席大会并发表重要讲话,强调历史和实践充分证明,中国共青团不愧为中国青年运动的( ),不愧为党的忠实助手和可靠后备军。
A. 预备队
B. 突击队
C. 冲锋队
D. 先锋队
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a641c.html
点击查看答案
84.()球面关节允许两边杆之间有三个独立的相对轴动,这种关节具有三个自由度。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6400.html
点击查看答案
57.在RLC串联电路中,()是正确的。
A. ωL>ωC,电路呈感性;
B. ωL=ωC,电路呈阻性;
C. ωL>ωC,电路呈容性;
D. ωC>ωL,电路呈容性。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6400.html
点击查看答案
566.下图所示电路中,流过元件A的电流I等于()。
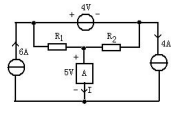
A. 1A
B. 2A
C. -1A
D. -2A
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6410.html
点击查看答案
352.()PLC的工作过程是周期循环扫描,基本分成三个阶段进行,既输入采样阶段、程序执行阶段和输出刷新阶段。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a548-c091-da481f4a6422.html
点击查看答案









