10.()机器人最大稳定速度高,允许的极限加速度小,则加减速的时间就会长一些。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a6404.html
点击查看答案
55.()灵活性低的工业机器人,其外围设备较为复杂。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-89f0-c091-da481f4a640a.html
点击查看答案
170.()压力觉传感器主要应用在精确抓握物体的手掌等端部执行器上。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6408.html
点击查看答案
25.机器人三大定律是()。
A. 可以超越人类行事。
B. 不能伤害人类,如果人类遇到麻烦,要主动帮助。
C. 在不违背第一定律的前提下,服从人类的指令。
D. 在不违背第一和第二定律的前提下,保护好自己。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a6402.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
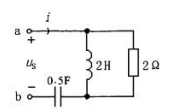
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案
534.要求蜗杆有自锁性则应选择()。
A. 单头蜗杆
B. 双头蜗杆
C. 三头蜗杆
D. 四头蜗杆
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a6415.html
点击查看答案
325.()年,电子学家德沃尔获得了一项“可编程序机械手”的专利。
A. 1954
B. 1958
C. 1956
D. 1966
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5708-c091-da481f4a641e.html
点击查看答案
310.()对自动控制系统而言,若扰动产生在系统内部,则称为内扰动。若扰动来自系统外部,则叫外扰动。两种扰动都对系统的输出量产生影响。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a641f.html
点击查看答案
115.()机器人视觉技术是把机器视觉加入到工业机器人应用系统中,相互协调完成相应工作的。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a641f.html
点击查看答案
539.与一个投影面垂直的直线,一定与其他两个投影面平行,这样的直线称为投影面的()。
A. 平行线
B. 垂直线
C. 倾斜线
D. 任意位置线
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6e78-c091-da481f4a641a.html
点击查看答案









