3.工业机器人手动模式设置的速度一般分为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-2f88-c091-da481f4a6402.html
点击查看答案
166.()接近度传感器、听觉传感器和视觉传感器属于外部传感器。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6404.html
点击查看答案
166.十进制整数-1256在十六位计算机系统中用二进制表示是()。
A. 10011101000
B. 1001001010110
C. 1001001001010110
D. 1111101100011000
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a640e.html
点击查看答案
476.一水平放置的双伸出杆液压缸,采用三位四通电磁换向阀,要求阀处于中位时,液压泵卸荷,且液压缸闭锁不动,其中位机能应选用()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-66a8-c091-da481f4a6423.html
点击查看答案
174.光敏电阻在强光照射下电阻值()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a6416.html
点击查看答案
359.()输入继电器用于接收外部输入设备的开关信号,因此在梯形图程序中不出现器线圈和触点。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a930-c091-da481f4a6403.html
点击查看答案
183.低压电缆的屏蔽层要(),外面要有绝缘层,以防与其他接地线接触相碰。
A. 接零
B. 接设备外壳
C. 多点接地
D. 一端接地
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-4768-c091-da481f4a641f.html
点击查看答案
583.下图所示电路中,uS(t)=2sintV,则端口网络相量模型的等效阻抗等于()。
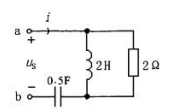
A. (1-j1)
B. (1+j1)
C. (1-j2)
D. (1+j2)
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6421.html
点击查看答案
282.机器人四大家中,属于瑞士的是()。
A. ABB
B. KUKA
C. YASKAWA
D. FANUC
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-5320-c091-da481f4a6416.html
点击查看答案
291.()双向移位寄存器既可以将数码向左移,也可以向右移。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-a160-c091-da481f4a640c.html
点击查看答案









