



A、正确
B、错误
答案:A


A、正确
B、错误
答案:A


A. 美国
B. 日本
C. 德国
D. 瑞典
A. 正确
B. 错误
A. 重启
B. 重置系统
C. 重置RAPID
D. 恢复到上次自动保存的状态
A. 正确
B. 错误
A. 正确
B. 错误
A. 正确
B. 错误
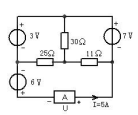
A. 4V
B. 16V
C. -10V
D. -16V
A. 正确
B. 错误
A. 正确
B. 错误
A. 机械手
B. 手臂末端
C. 手臂
D. 行走部分

