19.()机器人柔顺性装配技术分两种:主动柔顺装配和被动柔顺装配。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8608-c091-da481f4a640d.html
点击查看答案
66.工业机器人按作业任务的不同可以分为焊接、()等类型机器人。
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3758-c091-da481f4a6409.html
点击查看答案
29.党的二十大报告中指出,我们要推进( )建设,坚持山水林田湖草沙一体化保护和系统治理,统筹产业结构调整、污染治理、生态保护、应对气候变化,协同推进降碳、减污、扩绿、增长,推进生态优先、节约集约、绿色低碳发展。
A. 美丽中国
B. 生态中国
C. 绿色中国
D. 自然中国
https://www.shititong.cn/cha-kan/shiti/0005f540-9b01-3930-c091-da481f4a6413.html
点击查看答案
113.机器人三原则是由()提出的。
A. 森政弘
B. 约瑟夫•英格伯格
C. 托莫维奇
D. 阿西莫夫
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-3f98-c091-da481f4a6421.html
点击查看答案
171.()从机器人的应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-95a8-c091-da481f4a6409.html
点击查看答案
150.()直线电机由于不需要中间传动机械,因而使整个机械得到简化,提高了精度,减少了振动和噪声。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-91c0-c091-da481f4a641b.html
点击查看答案
45.视觉系统可以分为()部分。
A. 图像输入
B. 图像整合
C. 图像输出
D. 图像处理
https://www.shititong.cn/cha-kan/shiti/0005f540-e2e3-3370-c091-da481f4a6416.html
点击查看答案
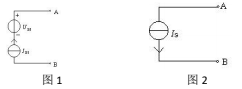
556.已知下图1中的US1=4V,IS1=2A。用下图2所示的等效理想电流源代替图1所示的电路,该等效电流源的参数为()。
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-7260-c091-da481f4a6406.html
点击查看答案
100.()运动速度和加速度是表明机器人运动特性的主要指标。
https://www.shititong.cn/cha-kan/shiti/0005f540-e4d3-8dd8-c091-da481f4a6410.html
点击查看答案
495.用同样定量泵,节流阀,溢流阀和液压缸组成下列几种节流调速回路,()能够承受负值负载。
A. 进油节流调速回
B. 回油节流调速回路
C. 旁路节流调速回路
D. 以上都对
https://www.shititong.cn/cha-kan/shiti/0005f540-e255-6a90-c091-da481f4a6411.html
点击查看答案









