108.联机表单采用轨迹逼近时,设置“圆滑过渡距离“为100mm,表示( )
A. 圆滑过渡曲线为圆弧,100mm为圆弧半径
B. 圆滑过渡曲线为圆弧,100mm为距离目标点100mm处开始圆滑过渡
C. 圆滑过渡曲线为抛物线,100mm为距离目标点100mm处开始圆滑过渡
D. 以上都不正确
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f71a-d7f0-c0b0-1da3a284e621.html
点击查看答案
37..变位机的运动数(自由度)主要取决于被加工件的大小。()
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-3a48-c0b0-1da3a284e610.html
点击查看答案
116.用传感器采集环境信息是机器人智能化的第一步。( )
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-4218-c0b0-1da3a284e60f.html
点击查看答案
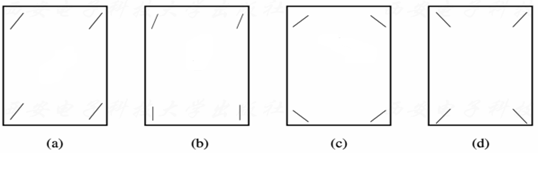
79.下列图形中,根据车轮转向角,判断哪种图形是正确的旋转方式:( )
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f71a-d7f0-c0b0-1da3a284e604.html
点击查看答案
16.运动控制的电子齿轮模式是一种主动轴与从动轴保持一种灵活传动比的随动系统。( )
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-3660-c0b0-1da3a284e60f.html
点击查看答案
67.机器人的自由度是指工业机器人相对坐标系能够进行独立运动的数目,包括末端执行器的动作,如焊接、喷涂等。()
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-3e30-c0b0-1da3a284e606.html
点击查看答案
102.在用机器人进行弧焊作业中,对夹具的要求描述错误的是:( )
A. 减少定位误差
B. 装拆方便
C. 工件的固定和定位自动化
D. 回避与焊枪的干涉
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f71a-d7f0-c0b0-1da3a284e61b.html
点击查看答案
10.运动控制的电子齿轮模式是一种主动轴与从动轴保持一种灵活传动比的随动系统。( )
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-3660-c0b0-1da3a284e609.html
点击查看答案
24.一般情况下工业机器人系统中下列()位置存在急停按钮。
A. 机器人示教器上
B. 机器人控制器上
C. 系统主控面板上
D. 机器人本体上
E.
F.
G.
H.
I.
J.
解析:
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f7c4-27b0-c0b0-1da3a284e608.html
点击查看答案
115.机器人的运动学方程只局限于对静态位置的讨论。( )
https://www.shititong.cn/cha-kan/shiti/0005f7ff-f89b-4218-c0b0-1da3a284e60e.html
点击查看答案









