85.下列不属于燃料电池电动汽车的系统是()。
A. 燃料电池系统系统
B. 车载储氢系统
C. 整车控制系统
D. 燃油供给系统
https://www.shititong.cn/cha-kan/shiti/00147ba2-5768-b5fd-c0ea-0fb8ebcf6b00.html
点击查看答案
56.汽车ACC系统启动车速一般大于()。
A. 5km/h
B. 10km/h
C. 15km/h
D. 25km/h
https://www.shititong.cn/cha-kan/shiti/00147ba2-5765-084a-c0ea-0fb8ebcf6b00.html
点击查看答案
22.车载传感器中,()测量精度和速度表现最优异。
A. 倒车雷达
B. 毫米波雷达
C. 激光雷达
D. 视觉传感器
https://www.shititong.cn/cha-kan/shiti/00147ba2-5764-bedd-c0ea-0fb8ebcf6b00.html
点击查看答案
43.自动驾驶汽车功能复杂,为了保证各个模块和功能间不互相影响和安全性考虑,大量采用域控制器。根据不同的功能实现分为:车身域控制器、车载娱乐域控制器、动力总成域控制器、()等。
A. 自动驾驶域控制器
B. 电机控制器
C. 电池管理控制器
D. 伺服控制器
https://www.shititong.cn/cha-kan/shiti/00147ba2-5764-eb73-c0ea-0fb8ebcf6b00.html
点击查看答案
50、在语音识别中,按照从微观到宏观的顺序排列正确的是()。
A. 帧-状态-音素-单词
B. 帧-音素-单词-状态
C. 帧-音素-状态-单词
D. 音素-帧-状态-单词
https://www.shititong.cn/cha-kan/shiti/00147ba2-5763-6cdf-c0ea-0fb8ebcf6b00.html
点击查看答案
66.某品牌纯电动汽车高压控制盒内部控制电路如图所示,车辆快充结束时,()控制高压系统下电。
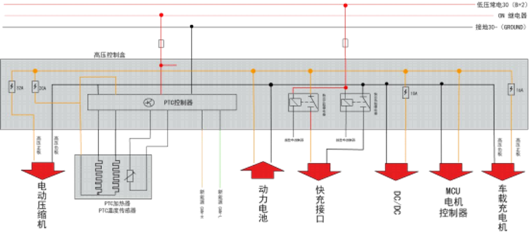
A. 电池控制器
B. 整车控制器
C. 车载充电机
D. 高压控制盒
https://www.shititong.cn/cha-kan/shiti/00147ba2-5766-aeb4-c0ea-0fb8ebcf6b00.html
点击查看答案
94、应用电容式传感器测量微米级的距离,应该采用改变()的方式。
A. 极间物质介电系数
B. 极板面积
C. 极板距离
D. 电压
https://www.shititong.cn/cha-kan/shiti/00147ba2-5763-c277-c0ea-0fb8ebcf6b00.html
点击查看答案
95.当动力电池组具有较高的电量且动力电池组输出功率满足整车行驶功率需求时,串联混合动力电动汽车以()模式工作,此时发动机——发电机组处于关机状态。
A. 再生制动充电
B. 纯电池组驱动
C. 混合动力驱动
D. 混合补充充电
https://www.shititong.cn/cha-kan/shiti/00147ba2-5768-cb2a-c0ea-0fb8ebcf6b00.html
点击查看答案
74、一般来说,跟履带式机器人相比,轮式移动机器人具有以下优点()。
A. 可提供更大的牵引力,更大的加速度
B. 可以提供比轮子更好的平衡
C. 具有更强的越障能力
D. 运动效率更高
https://www.shititong.cn/cha-kan/shiti/00147ba2-5763-9c99-c0ea-0fb8ebcf6b00.html
点击查看答案
181.正确的电动汽车拖车方法是()。
A. 四轮着地
B. 前轮着地
C. 后轮着地
D. 四轮托起
https://www.shititong.cn/cha-kan/shiti/00147ba2-5767-9505-c0ea-0fb8ebcf6b00.html
点击查看答案









