



A、 9V
B、 12V
C、 14V
D、 300V以上
答案:C
解析:由于我无法直接查看图片链接中的内容,我将基于一般的DC/DC变换器工作原理来解析这个问题。
在新能源汽车中,DC/DC变换器的主要作用是将电池的高电压转换成适合车辆低压系统(例如12V的照明、信号和娱乐系统)的电压。题目中提到的DC/DC变换器输出工作电压的选择题,选项分别是:
A. 9V B. 12V C. 14V D. 300V以上
解析如下:
A. 9V - 这个电压通常对于汽车低压系统来说偏低。虽然某些特殊用途可能需要9V,但一般而言,汽车低压系统标准电压不是9V。
B. 12V - 这是传统汽车低压系统的工作电压,许多车辆电气系统仍然采用这一标准。然而,对于新能源汽车,特别是使用DC/DC变换器的情况,可能会选择一个稍高的电压来优化系统性能。
C. 14V - 在一些新能源汽车中,为了提高系统效率和性能,可能会选择略高于12V的电压,如14V。这个电压既能满足低压系统的需求,又可以为某些需要较高电压的负载提供更好的支持。
D. 300V以上 - 这个电压远高于汽车低压系统的标准电压,通常是电池组的电压水平,而不是DC/DC变换器的输出电压。
根据以上分析,正确答案选择C(14V)的原因可能是出于以下考虑:
14V比传统的12V能提供更高的系统电压,可能有助于提高某些电气设备的性能。
一些现代汽车可能需要14V来支持更高效的电气系统,尤其是在新能源汽车中。
题目给出的DC/DC变换器电路图可能明确指出了输出电压为14V,或者电路参数设计使得输出电压落在14V。
因此,在没有电路图具体信息的情况下,根据新能源汽车电气系统的趋势和DC/DC变换器的一般应用,14V是一个合理的选择。
选择「段落」
可继续追问~



A、 9V
B、 12V
C、 14V
D、 300V以上
答案:C
解析:由于我无法直接查看图片链接中的内容,我将基于一般的DC/DC变换器工作原理来解析这个问题。
在新能源汽车中,DC/DC变换器的主要作用是将电池的高电压转换成适合车辆低压系统(例如12V的照明、信号和娱乐系统)的电压。题目中提到的DC/DC变换器输出工作电压的选择题,选项分别是:
A. 9V B. 12V C. 14V D. 300V以上
解析如下:
A. 9V - 这个电压通常对于汽车低压系统来说偏低。虽然某些特殊用途可能需要9V,但一般而言,汽车低压系统标准电压不是9V。
B. 12V - 这是传统汽车低压系统的工作电压,许多车辆电气系统仍然采用这一标准。然而,对于新能源汽车,特别是使用DC/DC变换器的情况,可能会选择一个稍高的电压来优化系统性能。
C. 14V - 在一些新能源汽车中,为了提高系统效率和性能,可能会选择略高于12V的电压,如14V。这个电压既能满足低压系统的需求,又可以为某些需要较高电压的负载提供更好的支持。
D. 300V以上 - 这个电压远高于汽车低压系统的标准电压,通常是电池组的电压水平,而不是DC/DC变换器的输出电压。
根据以上分析,正确答案选择C(14V)的原因可能是出于以下考虑:
14V比传统的12V能提供更高的系统电压,可能有助于提高某些电气设备的性能。
一些现代汽车可能需要14V来支持更高效的电气系统,尤其是在新能源汽车中。
题目给出的DC/DC变换器电路图可能明确指出了输出电压为14V,或者电路参数设计使得输出电压落在14V。
因此,在没有电路图具体信息的情况下,根据新能源汽车电气系统的趋势和DC/DC变换器的一般应用,14V是一个合理的选择。
选择「段落」
可继续追问~




A. 出于信号的可靠性和安全性考虑,每个加速传感器采用独立的电源、搭铁和信号
B. 装设两个加速踏板位置传感器,技术上称为“冗余系统”。
C. 加速踏板依靠电压来传递信息,在进行检测时,电压检测一般在工作状态下进行
D. 该车系采用的是非接触式加速踏板位置传感器结构
解析:https://yi2.oss-cn-shenzhen.aliyuncs.com/00148399d288bbeac0a8777418075700.png 看起来您上传了一个空页面,请检查网址

A. 电机控制器供电保险丝损坏
B. 电机控制器使能控制断路
C. 至高压控制盒的线缆绝缘性能低
D. 电机控制器至VBU的新能源CANH断路
解析:选项解析:
A. 电机控制器供电保险丝损坏 如果电机控制器的供电保险丝损坏,那么电机控制器将无法得到所需的电源,从而导致诊断仪无法与电机控制器取得联系。这是一个可能导致故障的原因。
B. 电机控制器使能控制断路 电机控制器的使能控制是用来允许控制器操作的信号。如果这个控制断路,那么电机控制器将不会启用,因此诊断仪同样无法与其取得联系。这也是一个可能导致故障的原因。
C. 至高压控制盒的线缆绝缘性能低 这个选项提到的是至高压控制盒的线缆绝缘性能问题。线缆的绝缘性能低可能会导致短路或漏电,但不会直接影响电机控制器与诊断仪之间的通信联系。因此,这个选项不会造成诊断仪无法与电机控制器取得联系的故障。
D. 电机控制器至VBU的新能源CANH断路 CANH(控制器区域网络高)线是新能源汽车通信网络的一部分。如果电机控制器至VBU(车辆控制单元)的CANH线断路,那么通信网络将被中断,诊断仪自然无法与电机控制器取得联系。这也是一个可能导致故障的原因。
为什么选C: 选项C描述的是高压控制盒线缆的绝缘性能问题,这与电机控制器的通信电路无直接关系。电机控制器与诊断仪之间的通信故障通常是由于电源问题、控制信号问题或通信线路问题造成的。因此,C选项中的情况不会导致诊断仪无法与电机控制器取得联系,是正确答案。

A. 闭合
B. 断开
C. 虚接
D. 错接
解析:https://yi2.oss-cn-shenzhen.aliyuncs.com/00148399d28ec33cc0a8777418075700.png 看起来您上传了一个空页面,请检查网址
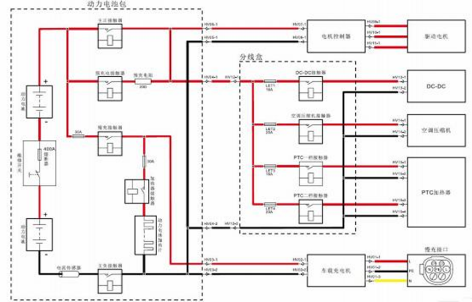
A. 慢充接触器和主负接触器
B. 主正接触器和主负接触器
C. 预充接触器和主负接触器
D. 以上均不对
解析:由于我无法直接查看您提供的图片链接,我将基于纯电动汽车充电系统的一般原理来解析这道题。
在纯电动汽车的高压连接线图中,通常会包含以下几个关键的接触器:
慢充接触器:用于控制充电电流的流入,当车辆进行慢充时,这个接触器会闭合。
主正接触器:连接高压电池的正极,通常在车辆启动和运行时闭合。
主负接触器:连接高压电池的负极,与主正接触器配合使用,控制高压系统的通断。
预充接触器:在高压系统启动前,预充接触器会先闭合,以限制启动时的电流,保护高压系统。
根据题目描述,我们需要确定在充电时闭合的接触器。
选项解析:
A. 慢充接触器和主负接触器:当车辆进行充电时,慢充接触器需要闭合以允许充电电流流入,而主负接触器闭合以连接高压电池的负极,形成完整的充电回路。因此,这个选项是合理的。
B. 主正接触器和主负接触器:这两个接触器在车辆运行时闭合,但并不专门用于充电过程,尤其是在慢充情况下。
C. 预充接触器和主负接触器:预充接触器用于启动前的预充过程,而不是整个充电过程,因此这个选项不正确。
D. 以上均不对:由于选项A是正确的,这个选项不成立。
为什么选这个答案: 答案是A,因为在充电过程中,慢充接触器和主负接触器是必须闭合的,以允许充电电流流入高压电池,并确保充电回路的完整性。其他选项要么与充电过程无关,要么不是在充电过程中始终闭合的接触器。

A. 电池控制器
B. 整车控制器
C. 车载充电机
D. 高压控制盒
解析:https://yi2.oss-cn-shenzhen.aliyuncs.com/00148399d2955e86c0a8777418075700.png 看起来您上传了一个空页面,请检查网址
A. 国家认可的《特种作业操作证(低压电工)》
B. 合格证
C. 安全防护等级证书
D. 行驶证
解析:选项解析:
A. 国家认可的《特种作业操作证(低压电工)》:这个资质证明维修技师具备进行电气设备维护和修理的专业技能和安全知识,是新能源汽车维修技师应具备的重要资质,因为新能源汽车涉及到高压电系统。
B. 合格证:这个选项比较模糊,"合格证"可能指的是多种不同的合格证明,并不特指新能源汽车维修所需要的特定技能或知识。
C. 安全防护等级证书:这个证书可能涉及个人防护装备的使用和安全操作程序,但不是新能源汽车维修的直接资质要求。
D. 行驶证:这是车辆合法上路的证明,与维修技师的资质无关。
为什么选这个答案:
答案是A,因为《特种作业操作证(低压电工)》是针对从事特种作业人员的资格认证,新能源汽车维修技师在维修过程中会接触到高压电系统,因此需要具备相应的操作资格和专业知识,以确保操作安全和维修质量。其他选项要么与维修资质无关,要么太过模糊,不能证明技师具备必要的专业技能。
选择「段落」
可继续追问~
A. 交流电流
B. 直流电压
C. 交流电压
D. 直流电流
解析:这道题目考察的是对数字万用表上不同档位标识的理解。我们来逐一分析各个选项:
A. 交流电流:在数字万用表上,A~档通常用来测量交流电流。波浪线“~”是交流电的符号,因此A~明确指示了这是用于测量交流电流的档位。
B. 直流电压:直流电压在万用表上通常用V-(或V DC)来表示,其中“-”或“DC”代表直流。此选项与A~档不符。
C. 交流电压:交流电压在万用表上通常用V~(或V AC)来表示,其中“~”代表交流。虽然它涉及交流电,但测量的是电压而非电流,因此与A~档不匹配。
D. 直流电流:直流电流在万用表上通常用A-(或mA-、μA-等,具体取决于电流的量级)来表示,其中“-”代表直流。此选项同样与A~档不符。
综上所述,A~档在数字万用表上代表的是交流电流的测量档位。因此,正确答案是A。
A. 不能使用直流电压档测量交流电
B. 当使用交流电压档测量蓄电池电压为0时,表明蓄电池已彻底放电
C. 当使用万用表的直流电压档测量车辆上的保险丝两端电压为0时,表示此时线路没有供电
D. 当使用蜂鸣档测量保险丝时,如果蜂鸣器发出声响,表明保险丝没有问题
解析:选项A:不能使用直流电压档测量交流电。这个选项是正确的,因为直流电压档是专为测量直流电设计的,如果用来测量交流电,将无法得到准确的读数,甚至可能会损坏万用表。
选项B:当使用交流电压档测量蓄电池电压为0时,表明蓄电池已彻底放电。这个选项是错误的。蓄电池提供的是直流电,而不是交流电。如果用交流电压档测量直流电压,结果不会准确。即使蓄电池完全放电,也应该使用直流电压档来测量。
选项C:当使用万用表的直流电压档测量车辆上的保险丝两端电压为0时,表示此时线路没有供电。这个选项是不完全正确的。电压为0可能表示没有供电,但也可能是测量方法不当或保险丝本身断路导致的。需要进一步检查确认。
选项D:当使用蜂鸣档测量保险丝时,如果蜂鸣器发出声响,表明保险丝没有问题。这个选项是错误的。蜂鸣档用于检测电路的连通性,如果蜂鸣器响,只能说明电路是通的,但不能确定保险丝没有问题。保险丝可能已经熔断,但由于测量方法或位置的问题,仍然可能发出声响。
正确答案是A,因为只有选项A的描述是完全正确的,指出了不能使用直流电压档测量交流电的原则。其他选项都有可能导致误解或错误的操作。
选择「段落」
可继续追问~
A. PTC
B. NTC
C. LDR
D. HDR
解析:这道题目考察的是对车辆电子系统中不同类型电阻器的识别和应用场景的理解。
A. PTC (Positive Temperature Coefficient) 电阻,即正温度系数热敏电阻。这种电阻的阻值随着温度的升高而增大。在车辆电子系统中,PTC电阻常用于测量加热元件的温度,因为它能在加热元件过热时通过增大阻值来限制电流,从而起到保护作用。
B. NTC (Negative Temperature Coefficient) 电阻,即负温度系数热敏电阻。其阻值随着温度的升高而减小,与PTC相反。虽然NTC电阻也常用于温度测量,但在需要防止过热的应用场景中,PTC更为合适。
C. LDR (Light Dependent Resistor) 或称光敏电阻,其阻值随光照强度的变化而变化,与温度测量无关,因此不适用于测量加热元件的温度。
D. HDR 并不是一个标准的电子元件术语,可能是一个误写或不存在的缩写,因此可以排除。
综上所述,车辆电子系统中用于测量加热元件的热敏电阻一般是PTC电阻,因为它能在元件过热时通过增大阻值来限制电流,从而起到保护作用。因此,正确答案是A. PTC。
A. 可以用于后视镜加热电路
B. 随温度的上升电阻下降
C. 通常用于发动机冷却液温度传感器
D. 通常用于保险丝
解析:选项A:可以用于后视镜加热电路。PTC(正温度系数)热敏电阻在温度升高时,其电阻值也会随之增大。这种特性使得PTC热敏电阻可以用在后视镜加热电路中,当电路接通时,PTC热敏电阻发热,用以加热后视镜,除去镜面上的雾气或霜冻。由于其自限温特性,不会发生过热,因此是安全的。
选项B:随温度的上升电阻下降。这个描述是错误的,因为PTC热敏电阻的特点是随温度上升,电阻值上升,而不是下降。这与NTC(负温度系数)热敏电阻的特性相反。
选项C:通常用于发动机冷却液温度传感器。这个说法是不正确的。发动机冷却液温度传感器一般使用NTC热敏电阻,因为NTC热敏电阻在温度升高时电阻值下降,这样可以更准确地测量冷却液的温度变化。
选项D:通常用于保险丝。这个选项也是不正确的。保险丝是利用金属丝的熔断特性来保护电路的,当电流超过一定值时,金属丝会因热效应熔断,切断电路,防止过载和短路。PTC热敏电阻并不用于代替保险丝。
所以,正确答案是A,因为PTC热敏电阻的自限温特性使其适合用于需要自动调节温度的场合,如后视镜加热电路。
选择「段落」
可继续追问~


